Featured products
-
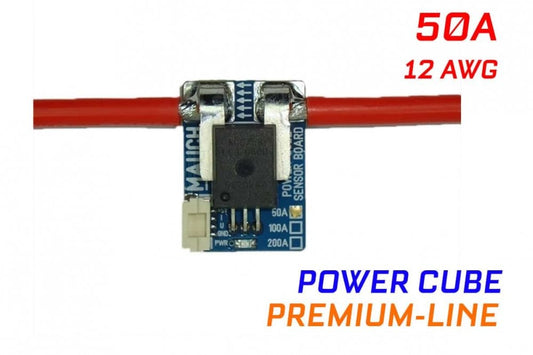
001: PL-050 Sensor Board (Shipment 15th of August 2026)
Regular price $39.37 USDRegular priceUnit price per -
002: PL-100 Sensor board (Shipment 15th of August 2026)
Regular price $39.37 USDRegular priceUnit price per -
003: PL-200 Sensor Board (Shipment 15th of August 2026)
Regular price $40.95 USDRegular priceUnit price per -
004: PL-200/8 Sensor Board (Shipment 15th of August 2026)
Regular price $45.71 USDRegular priceUnit price per -
005: PL-200/8 120V Sensor Board (Shipment 15th of August 2026)
Regular price $50.71 USDRegular priceUnit price per -
010: PL Sensor Hub X2-V2 (Shipment 15th of August 2026)
Regular price $46.51 USDRegular priceUnit price per -
013: Sensor Hub X8 (Shipment 15th of August 2026)
Regular price $211.11 USDRegular priceUnit price per -
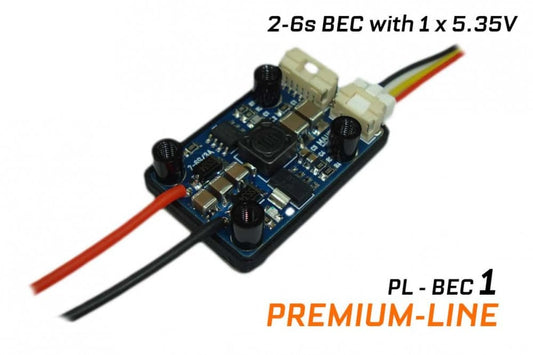
015: PL 2-6S BEC 1x5.35V (Shipment 15th of August 2026)
Regular price $27.94 USDRegular priceUnit price per